WARNING:
JavaScript is turned OFF. None of the links on this concept map will
work until it is reactivated.
If you need help turning JavaScript On, click here.
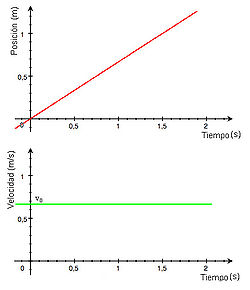
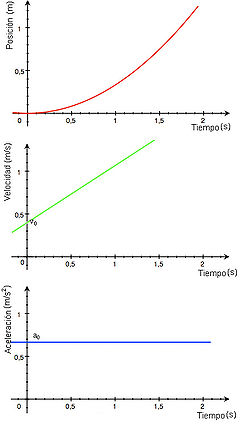
Este mapa conceptual ten información relativa a: cinematica1bach, <math xmlns="http://www.w3.org/1998/Math/MathML"> <mrow> <mmultiscripts> <mtext> a </mtext> <mtext> cp </mtext> <none/> </mmultiscripts> <mtext> ≠ 0 e </mtext> <mmultiscripts> <mtext> a </mtext> <mtext> t </mtext> <none/> </mmultiscripts> <mtext> ≠ 0 </mtext> </mrow> </math> ???? MCUA, Vectoriais desprazamento <math xmlns="http://www.w3.org/1998/Math/MathML"> <mrow> <mtext> Δr = r - </mtext> <mmultiscripts> <mtext> r </mtext> <mtext> 0 </mtext> <none/> </mmultiscripts> </mrow> </math>, <math xmlns="http://www.w3.org/1998/Math/MathML"> <mrow> <mmultiscripts> <mtext> a </mtext> <mtext> m </mtext> <none/> </mmultiscripts> <mtext> = </mtext> <mfrac> <mtext> Δv </mtext> <mtext> Δt </mtext> </mfrac> </mrow> </math> existen dous tipos de aceleración (compoñentes intrínsecas) aceleración centrípeta, MCUA ???? v = ω · r, <math xmlns="http://www.w3.org/1998/Math/MathML"> <mrow> <mmultiscripts> <mtext> v </mtext> <mtext> m </mtext> <none/> </mmultiscripts> <mtext> = </mtext> <mfrac> <mtext> Δr </mtext> <mtext> Δt </mtext> </mfrac> </mrow> </math> a súa variación co tempo <math xmlns="http://www.w3.org/1998/Math/MathML"> <mrow> <mmultiscripts> <mtext> a </mtext> <mtext> m </mtext> <none/> </mmultiscripts> <mtext> = </mtext> <mfrac> <mtext> Δv </mtext> <mtext> Δt </mtext> </mfrac> </mrow> </math>, <math xmlns="http://www.w3.org/1998/Math/MathML"> <mrow> <mmultiscripts> <mtext> a </mtext> <mtext> i </mtext> <none/> </mmultiscripts> <mtext> = </mtext> <mfrac> <mtext> dv </mtext> <mtext> Δt </mtext> </mfrac> </mrow> </math> existen dous tipos de aceleración (compoñentes intrínsecas) <math xmlns="http://www.w3.org/1998/Math/MathML"> <mrow> <mtext> a = </mtext> <msqrt> <mrow> <mmultiscripts> <mtext> a </mtext> <mtext> cp </mtext> <mtext> 2 </mtext> </mmultiscripts> <mtext> + </mtext> <mmultiscripts> <mtext> a </mtext> <mtext> t </mtext> <mtext> 2 </mtext> </mmultiscripts> </mrow> </msqrt> </mrow> </math>, MCUA ???? s = φ · r, aceleración centrípeta o seu valor determinará o tipo de movemento <math xmlns="http://www.w3.org/1998/Math/MathML"> <mrow> <mmultiscripts> <mtext> a </mtext> <mtext> cp </mtext> <none/> </mmultiscripts> <mtext> = 0 e </mtext> <mmultiscripts> <mtext> a </mtext> <mtext> t </mtext> <none/> </mmultiscripts> <mtext> = 0 </mtext> </mrow> </math>, MCU ???? <math xmlns="http://www.w3.org/1998/Math/MathML"> <mrow> <mtext> f = </mtext> <mfrac> <mtext> 1 </mtext> <mtext> T </mtext> </mfrac> <mtext> (Hz) </mtext> </mrow> </math>, aceleración tanxencial o seu valor determinará o tipo de movemento <math xmlns="http://www.w3.org/1998/Math/MathML"> <mrow> <mmultiscripts> <mtext> a </mtext> <mtext> cp </mtext> <none/> </mmultiscripts> <mtext> ≠ 0 e </mtext> <mmultiscripts> <mtext> a </mtext> <mtext> t </mtext> <none/> </mmultiscripts> <mtext> ≠ 0 </mtext> </mrow> </math>, O estudo do movemento Cinemática para o seu estudo empregaremos magnitudes Vectoriais, aceleración tanxencial o seu valor determinará o tipo de movemento <math xmlns="http://www.w3.org/1998/Math/MathML"> <mrow> <mmultiscripts> <mtext> a </mtext> <mtext> cp </mtext> <none/> </mmultiscripts> <mtext> = 0 e </mtext> <mmultiscripts> <mtext> a </mtext> <mtext> t </mtext> <none/> </mmultiscripts> <mtext> = 0 </mtext> </mrow> </math>, <math xmlns="http://www.w3.org/1998/Math/MathML"> <mrow> <mtext> Δr = r - </mtext> <mmultiscripts> <mtext> r </mtext> <mtext> 0 </mtext> <none/> </mmultiscripts> </mrow> </math> a súa variación co tempo <math xmlns="http://www.w3.org/1998/Math/MathML"> <mrow> <mmultiscripts> <mtext> v </mtext> <mtext> m </mtext> <none/> </mmultiscripts> <mtext> = </mtext> <mfrac> <mtext> Δr </mtext> <mtext> Δt </mtext> </mfrac> </mrow> </math>, aceleración centrípeta o seu valor determinará o tipo de movemento <math xmlns="http://www.w3.org/1998/Math/MathML"> <mrow> <mmultiscripts> <mtext> a </mtext> <mtext> cp </mtext> <none/> </mmultiscripts> <mtext> ≠ 0 e </mtext> <mmultiscripts> <mtext> a </mtext> <mtext> t </mtext> <none/> </mmultiscripts> <mtext> ≠ 0 </mtext> </mrow> </math>, aceleración centrípeta ???? <math xmlns="http://www.w3.org/1998/Math/MathML"> <mrow> <mtext> a = </mtext> <msqrt> <mrow> <mmultiscripts> <mtext> a </mtext> <mtext> cp </mtext> <mtext> 2 </mtext> </mmultiscripts> <mtext> + </mtext> <mmultiscripts> <mtext> a </mtext> <mtext> t </mtext> <mtext> 2 </mtext> </mmultiscripts> </mrow> </msqrt> </mrow> </math>, Sistemas de referencia con movemento acelerado Sistemas non inerciais, aceleración centrípeta o seu valor determinará o tipo de movemento <math xmlns="http://www.w3.org/1998/Math/MathML"> <mrow> <mmultiscripts> <mtext> a </mtext> <mtext> cp </mtext> <none/> </mmultiscripts> <mtext> = 0 e </mtext> <mmultiscripts> <mtext> a </mtext> <mtext> t </mtext> <none/> </mmultiscripts> <mtext> ≠ 0 </mtext> </mrow> </math>, Vectoriais posición r, MRU ???? <math xmlns="http://www.w3.org/1998/Math/MathML"> <mrow> <mtext> v = </mtext> <mfrac> <mtext> Δx </mtext> <mtext> Δt </mtext> </mfrac> <mtext> = </mtext> <mfrac> <mrow> <mtext> x - </mtext> <mmultiscripts> <mtext> x </mtext> <mtext> 0 </mtext> <none/> </mmultiscripts> </mrow> <mrow> <mtext> t - </mtext> <mmultiscripts> <mtext> t </mtext> <mtext> 0 </mtext> <none/> </mmultiscripts> </mrow> </mfrac> <mtext> = </mtext> <mfrac> <mtext> e </mtext> <mtext> t </mtext> </mfrac> </mrow> </math>, <math xmlns="http://www.w3.org/1998/Math/MathML"> <mrow> <mmultiscripts> <mtext> a </mtext> <mtext> cp </mtext> <none/> </mmultiscripts> <mtext> = 0 e </mtext> <mmultiscripts> <mtext> a </mtext> <mtext> t </mtext> <none/> </mmultiscripts> <mtext> = 0 </mtext> </mrow> </math> ???? MRU
mru
mrua
{kind=link}
{kind=link}